
Rychlé odkazy



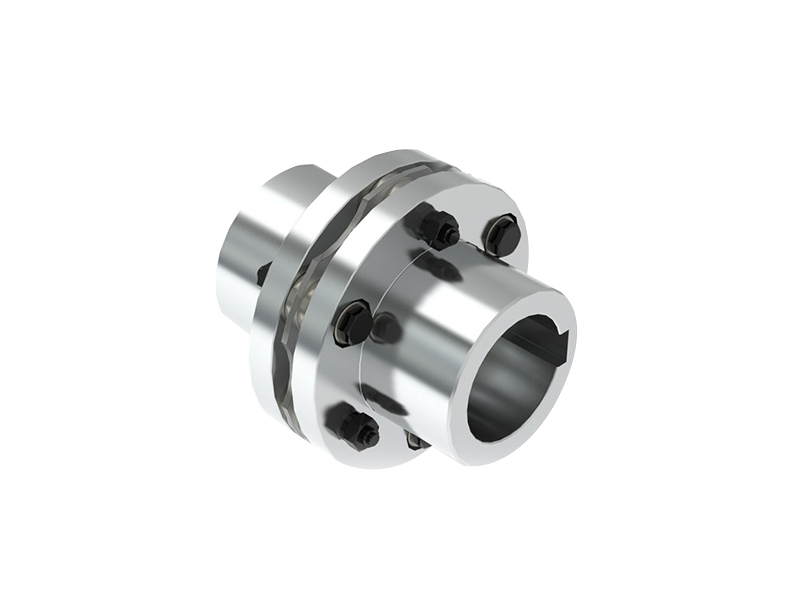
Vyrobeno z hliníkové slitiny, membrána je spojena s oběma hřídeli pomocí šroubů, což je lehké, má dobrou přenosovou schopnost točivého momentu a určité schopnosti kompenzace posunutí.
Konstrukční vlastnosti:
1. Materiál z hliníkové slitiny: Hlavní tělo je vyrobeno z vysoce pevných hliníkových slitin, které mají mnoho výhod. Za prvé, hustota hliníkové slitiny je nízká, což činí celkovou hmotnost spojky lehkou a může efektivně snížit mechanické zatížení. Je velmi vhodná pro aplikační scénáře s přísnými požadavky na hmotnost zařízení nebo potřebu snížit spotřebu energie, jako je letectví, robotika a další oblasti. Za druhé, hliníková slitina má dobrou odolnost proti korozi a může stabilně pracovat v některých vlhkých a korozivních prostředích, čímž snižuje náklady na údržbu a prostoje.
2. Struktura membrány: Hlavní součástí je membrána z nerezové oceli, která je obvykle ve tvaru kruhového kroužku nebo jiného specifického tvaru. Tloušťka membrány je obvykle tenká, ale má vysokou pevnost a elasticitu. Když dojde k relativnímu posunu mezi dvěma hřídelemi spojenými spojkou (například axiální posun, radiální posun, úhlový posun), membrána může vykazovat elastickou deformaci, čímž efektivně kompenzuje tyto posuny a zajišťuje plynulý přenos výkonu. Ve srovnání s jinými elastickými prvky je deformace membrány relativně malá, ale dokáže odolávat velkým kroutícím momentům a má dobrou pružnost, a může se rychle vrátit do svého původního stavu po deformaci.
3. Způsob upevnění šrouby: Membrána je na obou koncích spojky upevněna šrouby k pouzdru. Tento způsob upevnění je jednoduchý a spolehlivý a zajišťuje, že membrána a pouzdro jsou pevně spojeny, a membrána se při přenosu točivého momentu neuvolní ani neklouže. Počet, velikost a rozložení šroubů budou navrženy podle velikosti a požadavků na točivý moment spojky, aby se zajistila celková pevnost a stabilita spojky.
Výkonové parametry:
Schopnost přenosu točivého momentu, rozsah rychlosti, schopnost kompenzace posunutí
Aplikace:
Průmysl strojů, automatizované výrobní linky, oblast robotiky

Hliníková slitina se šroubovou spojkou s klínovou drážkou

Standardní torzní šroubová spojka
Spojovací zařízení pro membrány typu MP

SWC-WD neteleskopické krátké univerzální spojování